ROVER DESIGN FOR RADIOACTIVE ENVIRONMENT
Team Member
(September 2018 - December 2018)
In my second year at the University of Toronto I joined my third design team where I gained a great amount of experience in CADing using solidworks. My team and I were tasked with designing an optimal autonomous rover capable of retrieving fuel cells from a radioactive environment. The rover was required to pick up the fuel cell and carry it to a different place via a gripping mechanism.
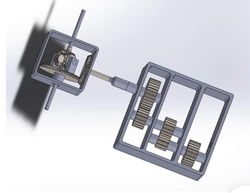
My team and I came up with a design consisting of a 3 – joint gripper arm with a 360 – degree “clip” gripper, inspired by a hair clip. This design was picked from three candidates using tools that compared the designs to our objectives, specifically the Weighted Decision matrix. Our objectives were ranked in importance using the Pairwise comparison tool. I was personally responsible for determining all aspects in relation to the arm and gripper design including the torque at each joint and their required motor (or gear ratio), the weight of each part of the arm (for torque calculation), the material capable of withstanding a radioactive environment (titanium), the costs for the arm, and the CADing of the arm. The gripper was chosen as rotational for it to pick up the fuel cell lying in any position and was designed to have pure rubber on the “palms” of to create a stronger grip. The gripper was also designed using a three-tooth worm gear and two 17 tooth spur gears which I had the privilege of self-learning to CAD.
While this project was challenging, I found that I learned a lot from the design stages to the art of making 3D models. This project made me discover my interests in CADing and allowed me to push myself to learn more than just what I had learned in my Solidworks labs. In terms of team collaboration, I found that having everyone participate and invest in the projects goal made it come to life. Ultimately, I learned of values important to me when it comes to my team members; accountability, curiosity, and respect.
3 - JOINT ROVER ARM WITH 360 - DEGREE ROTATIONAL GRIPPER
 |  |  |  |  |  |
|---|---|---|---|---|---|
 |  |  |  |  |  |
 |  |  |  |  |  |
 |